Motor Elétrico

Os motores elétricos de vários tamanhos.
Um motor elétrico converte energia elétrica em movimento mecânico. A tarefa inversa, que converte o movimento de mecânica em energia eléctrica, é realizado por um gerador ou dínamo. Em muitos casos os dois dispositivos diferem somente na sua aplicação e detalhes menores de construção.
A maioria dos motores eléctricos trabalhar por electromagnetismo , mas motores baseados em outros fenómenos eletromecânicas, tais como as forças electrostáticas e o efeito piezoeléctrico , também existem. O princípio fundamental sobre o qual os motores eletromagnéticos são baseados é que há uma força mecânica sobre qualquer fio quando está a conduzir eletricidade, enquanto contido dentro de um campo magnético. A força é descrita pela lei de força de Lorentz e é perpendicular a ambos os fios e o campo magnético. Em um motor rotativo, há um elemento de rotação, do rotor. O rotor gira porque os fios e o campo magnético estão dispostos de modo que um binário é desenvolvido em torno do eixo do rotor.
A maioria dos motores magnéticos são giratórios, mas os tipos lineares também existem. Em um motor rotativo, a parte rotativa (normalmente no interior) é chamado o rotor , e a parte fixa é chamado o estator . O motor contém electromagnetos que são enrolados sobre um quadro. Embora este quadro é muitas vezes chamado de armadura , esse termo é muitas vezes erroneamente aplicada.Correctamente, a armadura é a parte do motor através da qual a entrada de tensão é fornecido ou que parte do gerador através da qual a tensão de saída é gerado. Dependendo do desenho da máquina, quer do rotor ou do estator pode servir como a armadura.
Kits para fazer motores muito simples são usados ??em muitas escolas . Veja kits de motor de Westminster .
Motores de corrente contínua
Um dos primeiros motores rotativos eletromagnéticos, se não o primeiro, foi inventado por Michael Faraday em 1821 , e consistiu de uma imersão fio livre de suspensão em uma piscina de mercúrio . Uma permanente íman foi colocada no meio da piscina. Quando uma corrente foi passada através do fio, o fio girado em torno do magneto, que mostra que a corrente deu origem a um campo magnético em volta do fio. Este motor é muitas vezes demonstrado em aulas de física, mas salmoura às vezes é usado no lugar do mercúrio tóxico. Esta é a forma mais simples de uma classe de motores elétricos chamados motores homopolar .
O motor DC moderna foi inventada por acidente em 1873, quando Zénobe Gramme ligado a fiação dínamo para uma segunda unidade similar, dirigindo-lo como um motor.
O clássico DC motor tem uma armadura rotativa sob a forma de um electroíman com dois pólos. Um interruptor rotativo chamado umcomutador inverte o sentido da corrente eléctrica, duas vezes em cada ciclo, a fluir através da armadura de modo que os pólos do impulso electroíman e puxar contra os imans permanentes na parte externa do motor. À medida que os pólos do electroíman armadura passar os pólos dos ímans permanentes, o comutador inverte a polaridade do electroíman armadura. Durante esse instante de mudança de polaridade, inércia mantém o motor clássica indo na direção correta. (Veja os diagramas abaixo.)
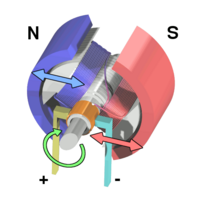
Um motor elétrico DC simples.Quando a bobina é alimentado, um campo magnético é gerado em torno da armadura. O lado esquerdo da armadura é empurrado para longe do ímã esquerda e desenhado para a direita, fazendo com que a rotação.
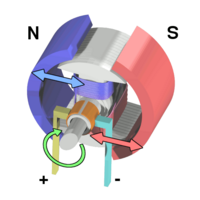
A armadura continua a rodar.
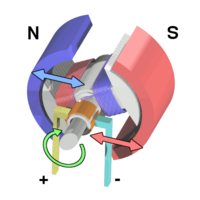
Quando a armadura ficar alinhadas horizontalmente, o comutador inverte o sentido da corrente através da bobina, a inversão do campo magnético. O processo então se repete.
Velocidade do motor DC geralmente depende de uma combinação da tensão e da corrente que flui nas bobinas do motor e da carga do motor ou o binário de travagem. A velocidade do motor é proporcional à tensão aplicada, e o binário é proporcional à corrente. A velocidade é normalmente controlada através da alteração da tensão ou corrente de fluxo usando torneiras nos enrolamentos do motor ou por ter uma fonte de tensão variável.
Como este tipo de motor pode desenvolver bastante alto torque em baixa velocidade é frequentemente usado em aplicações de tração, como locomotivas .
No entanto, há uma série de limitações no desenho clássico, muitos devido à necessidade de escovas para esfregar contra o comutador. A fricção cria atrito , e quanto maior a velocidade, mais difícil as escovas tem que pressionar para manter um bom contato. Não só este atrito fazer o motor barulhento, mas também cria um limite superior para a velocidade e faz com que as escovas eventualmente se desgastar e para exigir a substituição. O contato elétrico imperfeito também faz com que o ruído elétrico no circuito em anexo. Estes problemas desaparecem quando você ligar o motor dentro para fora, colocando os ímãs permanentes no interior e as bobinas do lado de fora projetando assim a necessidade de escovas em um brushless design. No entanto tais concepções precisa cuircuits electrónicos para controlar a comutação dos electromagnetos (função que é realizada em motores convencionais pelo comutador).
Campo de Feridas do motor DC
Os imans permanentes na parte externa ( estator ) de um motor de corrente contínua pode ser substituído por electromagnetos.Fazendo variar a corrente de campo, é possível alterar a relação entre a velocidade do motor / torque. Normalmente enrolamento de campo será colocado em série (série ferida) com enrolamento do induzido para obter um alto torque de baixa velocidade do motor, em paralelo (shunt ferida) com a armadura para obter um motor de baixo torque de alta velocidade, ou para ter um enrolamento em parte em paralelo, e em parte em série (ferida composto) para obter o melhor dos dois mundos. São possíveis para ganhar ainda mais velocidade, mas o torque correspondente diminuição de novas reduções das corrente de campo. Esta técnica é ideal para tração elétrica (veja a motor de tração ) e muitas aplicações semelhantes onde seu uso pode eliminar a exigência de uma transmissão variável mecanicamente.
Motores universais
Uma variante do motor DC campo ferida é o motor universal. O nome deriva do fato de que ele pode usar corrente de alimentação AC ou DC, embora, na prática, eles são quase sempre usado com fontes de corrente alternada. O princípio é que num motor de campo DC ferida actual, tanto no campo e a armadura (e, consequentemente, os campos magnéticos resultantes) será alternada (polaridade inversa), ao mesmo tempo, e, portanto, a força mecânica gerada é sempre a mesma. Na prática, o motor tem de ser especialmente concebidos para lidar com a corrente AC ( impedância / relutância deve ser tomado em conta), e o motor resultante é geralmente menos eficaz do que um motor de corrente contínua puro equivalente. A vantagem do motor universal é que as fontes de corrente alternada pode ser usado em motores que têm as características típicas de motores de corrente contínua, especificamente alto torque de partida e design muito compacto se altas velocidades de execução são usados. O aspecto negativo é a problemas de manutenção e confiabilidade causados ??pelo comutador , e como resultado, tais motores raramente será encontrado na indústria, mas são o tipo mais comum de CA fornecido motora em dispositivos como os robots de cozinha e ferramentas de poder que são usados ??apenas de forma intermitente . Controle de velocidade infinita de um motor universal em execução no AC é muito facilmente realizado usando umthyristor circuito, enquanto o controle de velocidade em degraus pode ser feito usando vários toques na bobina de campo.Liquidificadores domésticos que anunciam muitas velocidades combinam freqüentemente uma bobina de campo com várias torneiras e um diodo que pode ser inserido em série com o motor (fazendo com que o motor funcione em meia onda DC com metade do RMS de tensão da linha de alimentação AC).
Ao contrário das outras formas comuns de motores de corrente alternada (motores de indução e motores síncronos), motores universais podem facilmente exceder uma rotação por ciclo da rede de distribuição de corrente (isto é, superior a 3000 rpm em uma 50Hz sistema ou 3600 rpm num sistema de 60 Hz) . Isso os torna especialmente útil para certos aparelhos, como liquidificadores ,aspiradores de pó e secadores de cabelo em que a operação de alta velocidade é desejado.
Com o custo muito baixo de semicondutores retificadores , alguns aplicativos que já usaram um motor universal agora usam um motor DC puro, geralmente com um campo magnético permanente. Isto é especialmente verdadeiro se o circuito semicondutor é também utilizado para o controlo de velocidade variável.
Motores de corrente alternada
Os motores de indução operar porque um campo magnético em movimento induz um fluxo de corrente no rotor. Esta corrente no rotor cria o segundo campo magnético requerido (juntamente com o campo dos enrolamentos do estator) para produzir um binário. Os motores de indução são simples e, portanto, relativamente barato de construir. Eles não dependem de escovas como o motor de corrente contínua, e normalmente têm uma vida mais longa. Eles são, de longe, o tipo mais comum de motor para aplicações acima de 1 kW. Tipicamente, o rotor tem nenhuma ligação eléctrica para o mundo exterior, excepto no caso de motores de indução com rotor bobinado.
Todos os motores de indução são caracterizados pelo facto de, quando nenhuma carga é aplicada ao motor, o rotor gira a uma velocidade ligeiramente mais lenta do que a frequência da rede (ou um submúltiplo inteiro da frequência de rede). Isto é porque o rotor deve "deslizar" para trás contra o campo magnético em movimento, a fim de induzir qualquer corrente no rotor. Os aumentos de deslizamento (e as diminuições de velocidade do motor), como a carga no motor aumenta.
O princípio campo magnético rotativo foi concebido por Nikola Tesla , em 1882, e ele empregava para inventar um motor de indução de duas fases, em 1883. Michael von Dolivo-Dobrowlsky inventou o primeiro moderno trifásica "cage-rotor" em 1890. A introdução do do motor de 1888 em diante iniciou o que é conhecido como a segunda revolução industrial , possibilitando a geração eficiente e distribuição de longa distância de energia elétrica usando o sistema de transmissão de corrente alternada, também da invenção de Tesla (1888) [1] ( http: // www. tfcbooks.com/tesla/system.htm ) . Uma invenção recente notável por Anadish K. Pal (Patente US 6.717.300) é a utilização de um motor de indução para detectar a sua própria rotação na ausência da condução de energia eléctrica.Esta invenção tem aplicações em sistemas de alarme e predição de fracasso precoce dos motores de indução.
AC motores geralmente vêm em dois tipos: monofásica e trifásica .
Monofásicos motores de indução AC
Um motor de indução polifásico continuará a girar mesmo se uma fase for desconectado, com torque reduzida. No entanto, um motor polifásico parado não irá gerar qualquer torque de partida net, se estiver ligado apenas a uma alimentação monofásica. A chave para a concepção de motores de fase única, em seguida, é o de proporcionar um campo magnético rotativo para produzir o binário de arranque.
Um motor monofásico comum é o motor de pólo sombreado , que é usado em dispositivos que requerem menor de torque , comoventiladores , fornos de microondas e outros pequenos electrodomésticos. Neste motora, pequenos single-turn de cobre "bobinas de sombra" criar o campo magnético em movimento. Parte de cada pólo é cercada por uma bobina de cobre ou cinta; a corrente induzida na cinta opõe à variação do fluxo através da bobina (lei de Lenz), de modo que a intensidade máxima do campo move através da face do pólo em cada ciclo.
Outro motor AC monofásico comum é o motor de indução de fase dividida, comumente usado em aparelhos grandes , como máquinas de lavar e secadoras de roupa . Em comparação com o motor de pólo sombreado, estes motores podem geralmente fornecer muito maior torque de partida utilizando um especial inicialização enrolamento em conjunto com um interruptor centrífugo .
Na fase dividida motor, o enrolamento startup é projetado com uma maior resistência do que o enrolamento running. Isto cria um circuito que LR ligeiramente desloca a fase da corrente no enrolamento de arranque. Quando o motor está começando, o enrolamento startup está ligado à fonte de alimentação através de um conjunto de contactos de mola apertava pela chave centrífuga ainda-não-rotativo. O enrolamento de partida é enrolado com menos voltas do fio menor do que o enrolamento principal, portanto, tem uma resistência maior. A resistência extra cria um pequeno deslocamento de fase, não mais do que cerca de 30 graus, entre o fluxo devido ao enrolamento principal e o fluxo do enrolamento de partida.
A fase do campo magnético neste enrolamento de arranque é deslocada a partir da fase da rede de alimentação, permitindo a criação de um campo magnético em movimento que arranca o motor. Uma vez que o motor atinge perto de velocidade de operação design, o interruptor centrífugo ativa, abrindo os contatos e desligar o enrolamento da fonte de alimentação de inicialização. O motor, em seguida, opera exclusivamente no enrolamento running. O enrolamento de partida deve ser desligada pois aumentaria as perdas no motor.
Num motor de arranque condensador, uma começando condensador está inserido em série com o enrolamento de arranque, a criação de um circuito LC, que é capaz de uma maior mudança de fase (e, portanto, uma muito maior torque de partida). O condensador naturalmente acrescenta gasto de tais motores.
Outra variação é o motor Permanente Split-Capacitor (PSC). Este motor opera de forma semelhante ao motor condensador de arranque acima descrito, mas não há nenhum interruptor de partida centrífuga e o enrolamento está permanentemente ligado à fonte de energia segundo. Motores PSC são freqüentemente usadas em manipuladores de ar, ventiladores e sopradores e outros casos em que se deseja uma velocidade variável. Mudando torneiras sobre a dissolução, mas mantendo a constante carga de funcionamento, o motor pode ser feito para correr em diferentes velocidades.
Os rotores da maioria dos motores de indução monofásicos são do tipo gaiola design. Estes rotores teve seu nome retirado "enrolamentos" que são no estilo da roda em que animais roedores exercer: uma série de bares que se conectam anéis condutores em ambas as extremidades do rotor. Na verdade, esses "enrolamentos" não são enrolados no rotor mas em vez disso são lançados de alumínio que preenche as ranhuras na stackup de aço laminados . Porque cada um dos enrolamentos é uma única vez, as tensões induzidas nos enrolamentos do rotor são muito baixos e não há necessidade de isolar os enrolamentos "" moldadas no lugar das lâminas de aço. (As correntes do rotor são, é claro, na proporção tão elevada como a tensão é baixa, mas os enrolamentos de alumínio fundido tem muito pouca resistência eléctrica de modo I 2 R perdas no rotor são pequenos).
Monofásicos AC motores síncronos
Pequenas monofásicos motores AC também pode ser projetado com rotores magnetizados (ou diversas variações sobre essa idéia).Os rotores estes motores não necessitam de qualquer corrente induzida para que eles não escorregar para trás contra a frequência da rede. Em vez disso, eles giram de forma sincronizada com a frequência da rede. Por causa de sua velocidade de alta precisão, tais motores são normalmente utilizados para alimentar relógios mecânicos, áudio toca-discos e drives de fita ; antigamente eles também foram muito utilizadas em instrumentos de cronometragem precisas, tais como gravadores strip-chart ou mecanismos de acionamento telescópio. O motor síncrono sombreada-pólo é uma versão.
Porque inércia torna difícil para acelerar imediatamente o rotor parado para rotação síncrona, estes motores normalmente requerem algum tipo de recurso especial para começar. Vários modelos de usar um motor de indução pequena (que podem partilhar as mesmas bobinas de campo, o rotor como o motor síncrono) ou um rotor muito leve, com um mecanismo de uma via (para garantir que o rotor começa na direcção "para a frente").
Trifásicos motores de indução AC
Para aplicações de potência mais elevada, onde uma fonte elétrica polifásica está disponível, o trifásico (ou polifásica ) motor de indução AC é usado. As diferenças de fase entre as três fases da alimentação eléctrica polifásica criar um campo electromagnético rotativo no motor.
Existem dois tipos de rotores em uso. A maioria dos motores usar o rotor gaiola de esquilo discutido acima. Um projeto alternativo, chamado de rotor bobinado, é usado quando é necessário velocidade variável. Neste caso, o rotor tem o mesmo número de pólos como o estator e os enrolamentos são feitos de fio, ligado a anéis de deslizamento sobre o eixo. Escovas de carvão conectar os anéis deslizantes para um controlador externo, como um resistor variável que permite a mudança taxa de escorregamento do motor. Em certas unidades com rotor bobinado de velocidade variável de alta potência, a energia slip-freqüência é capturada, retificada e voltou para a fonte de alimentação através de um inversor.
Em comparação com rotores de gaiola, ferida motores de rotor são caros e exigem a manutenção dos anéis coletores e escovas, mas eles eram a forma padrão para controle de velocidade variável antes do advento de dispositivos eletrônicos de energia compacta.Inversores transistorizados com inversor de freqüência agora pode ser usado para controle de velocidade e motores com rotor bobinado são cada vez menos comum. (Inversores transistorizados também permitem que os motores trifásicos mais-eficiente para ser usado quando apenas rede monofásica atual está disponível.)
São usados ??vários métodos de iniciar um motor polifásico. Onde pode ser permitida a grande corrente de partida e alto torque de partida, o motor pode ser iniciado em toda a linha, através da aplicação de tensão de linha completa para os terminais. Quando for necessário para limitar a corrente de partida inicial (onde o motor é grande em comparação com a capacidade de curto-circuito da alimentação), reduziu a tensão inicial usando ou indutores da série, um autotransformador , tiristores , ou outros dispositivos são usados. Uma técnica usada às vezes é de partida estrela-triângulo, onde as bobinas do motor são inicialmente ligado em estrela para a aceleração da carga, depois passou para o delta quando a carga é até a velocidade. Transistorizados unidades pode variar a tensão aplicada directamente como exigido pelas características de partida do motor e da carga.
Como no motor monofásico, através de indução electromagnética , o campo magnético rotativo induz uma corrente nos condutores no rotor, que por sua vez cria um campo magnético que faz com que a equilibragem do rotor a girar no sentido do campo rotativo é. E, assim como com o motor monofásico, o rotor deve sempre girar mais lento do que o campo magnético rotativo produzido pela fonte elétrica polifásica; caso contrário, nenhum campo contrabalançando será produzido no rotor.
Este tipo de motor é cada vez mais comum em aplicações de tracção, como locomotivas, onde é conhecida como a assíncrona motor de tração .
A velocidade do motor de corrente alternada é determinada principalmente pela frequência da alimentação de corrente alternada e o número de pólos no estator de enrolamento, de acordo com a relação:
RPM = 2 * F * 60 / p
onde
- RPM = (síncrono) Revoluções por minutoF = freqüência de alimentação ACp = número de pólos, usualmente um número par, mas sempre um múltiplo do número de fases
O binário é uma função da quantidade de deslizamento, ou uma diferença de rotação, entre os campos do estator e do rotor. Os motores padrão têm entre 2-3% slip, motores especiais podem ter até 7% de deslizamento, e uma classe de motores conhecidos como motores de torque são classificados para operar em 100% de deslizamento (0 RPM / perda total).
O binário é determinada pela quantidade de deslizamento, ou uma diferença de rotação, entre os campos do estator e do rotor.
A velocidade neste tipo de motor tem sido tradicionalmente alteradas por ter conjuntos adicionais de bobinas ou pólos no motor que podem ser ligados e desligados para alterar a velocidade de rotação do campo magnético. No entanto, a evolução da eletrônica de potência significa que a frequência da fonte de alimentação pode agora também ser variada para fornecer um controle mais suave da velocidade do motor.
Motores síncronos AC trifásicos
Tal como acontece com motores de fase única, se as bobinas do rotor de um motor trifásico são alimentados com uma corrente de campo separada para criar um campo magnético contínuo (ou, se o rotor é constituído por um íman permanente), o resultado é uma chamada de um motor síncrono porque o rotor rodar em sincronismo com o campo magnético rotativo produzido pela fonte de energia eléctrica polifásica.
Um motor síncrono também pode ser usado como um alternador .
Hoje em dia, os motores síncronos são freqüentemente impulsionado por unidades de frequência variável transistorizados. Isto facilita grandemente o problema de partida do rotor maciço de um grande motor síncrono. Eles também podem ser iniciado como motores de indução usando um rotor de gaiola de enrolamento que compartilha o rotor comum: uma vez que o motor atinge a velocidade síncrona, nenhuma corrente é induzida no enrolamento de gaiola de esquilo por isso tem pouco efeito sobre a operação em sincronismo do motor.
Os motores síncronos são usados ??ocasionalmente como motores de tração; o TGV pode ser o exemplo mais conhecido dessa utilização.
Os motores de indução são os burros de carga da indústria e motores até cerca de 500 kW na saída são produzidos em tamanhos de quadros altamente padronizados, tornando-os quase completamente intercambiáveis ??entre os fabricantes (embora dimensões européias e norte-americana padrão são, naturalmente, diferentes).
Os motores de passo
Intimamente relacionado em design para trifásicos AC motores síncronos são motores de passo , onde um rotor interno contendo ímãs permanentes ou de um grande núcleo de ferro com pólos salientes é controlada por um conjunto de ímãs externos que são ligados por via electrónica. Um motor passo a passo pode também ser pensado como um cruzamento entre um motor eléctrico de corrente contínua e um solenóide . À medida que cada bobina é activada, por sua vez, o rotor se alinha com o campo magnético produzido pelo enrolamento de campo energizado. Ao contrário de um motor síncrono, na sua aplicação, o motor pode não rodar continuamente; em vez disso, ele "passos" de uma posição para a próxima como enrolamentos de campo são energizados e desenergizada em sequência. Dependendo da sequência, o rotor pode rodar para a frente ou para trás.
Controladores de motor de passo simples inteiramente energizar ou desenergizar inteiramente os enrolamentos de campo, levando o rotor para " cog "a um número limitado de posições; motoristas mais sofisticados podem proporcionalmente controlar o poder aos enrolamentos de campo permitindo que os rotores para a posição "entre" os pontos "dentadas" e, assim, rodar de forma bastante suave. Motores de passo controlado por computador são uma das formas mais versáteis de sistemas de posicionamento, especialmente quando parte de uma digital de servo-controlada sistema.
Motores brushless DC
A meio caminho entre ordinárias DC motores e motores de passo encontra-se o reino do motor DC sem escovas . Construído de forma muito semelhante ao de motores de passo, estes muitas vezes usar um ímã permanente externo rotor, três fases de bobinas de condução, um ou mais efeito Hall dispositivos para detectar a posição do rotor, e os componentes eletrônicos de unidade associadas.As bobinas são activadas, uma fase após o outro, pelos circuitos electrónicos de unidade como, marcadas por os sinais provenientes dos sensores de efeito de Hall. Com efeito, eles agem como motores síncronos trifásicos contendo suas próprias variáveis ??de unidade de frequência eletrônica.
Motores DC sem escovas são comumente usados ??para conduzir os fãs , os fusos dentro de CD , CD-ROM unidades (etc.), e mecanismos dentro dos produtos de escritório, como impressoras a laser e fotocopiadoras . Eles também encontrar uso significativo em aeronaves modelo elétrico de alto desempenho. Eles têm várias vantagens sobre os motores convencionais:
- Em comparação com os fãs AC usando motores sombreada pólos, eles são muito eficientes, correndo muito mais frio do que os motores AC equivalentes. Esta operação legal leva a vida muito melhorada do ventilador rolamentos .
- Sem um comutador de desgaste, a vida de um motor de CC sem escovas pode ser significativamente mais longo em comparação com um motor de corrente contínua utilizando escovas e um comutador
- Os mesmos dispositivos de efeito Hall que proporcionam a comutação também pode fornecer um conveniente tacômetro sinal para controle de circuito fechado aplicações (servo-controlados). Em fãs, o sinal do tacômetro pode ser usada para derivar um "fã okay" sinal.
- O motor pode ser facilmente sincronizado com um relógio interno ou externo, que conduz a um controlo preciso da velocidade.
Motores brushless modernos DC variam em poder de uma fração de um watt a muitos kilowatts.
Motores DC sem núcleo
Um motor de corrente contínua sem núcleo é uma forma especializada de um motor de corrente contínua comum. Optimizado para uma rápida aceleração , estes motores têm um rotor que é construído sem qualquer núcleo de ferro. O rotor pode assumir a forma de um cilindro cheio de liquidação dentro do estator ímãs, uma cesta em torno dos ímãs do estator, ou um apartamento pancake(possivelmente formado em uma placa de circuito impresso ) que funciona entre superior e inferior do estator ímãs. Os enrolamentos são tipicamente estabilizada por ser impregnada com epoxi resinas.
Uma vez que o rotor é muito mais leve em peso ( massa ) de um rotor convencional formado a partir de cobre enrolamentos de açolaminados, o rotor pode acelerar muito mais rapidamente, frequentemente atingir um mecânica constante de tempo de menos de 1 ms. Isto é especialmente verdadeiro se os enrolamentos usar alumínio em vez do cobre mais pesado. Mas porque existe nenhuma massa de metal no rotor agir como um dissipador de calor, mesmo pequenos motores sem núcleo têm frequentemente de ser arrefecida por ar forçado.
Estes motores foram usados ??para dirigir o cabrestante (s) de fitas magnéticas e discos são ainda largamente utilizados em sistemas de servo-controlados de alto desempenho.
Motores lineares
Um motor linear é essencialmente um motor elétrico que foi "desenrolado", de modo que, em vez de produzir um binário (rotação), que produz uma força linear ao longo de seu comprimento, criando um campo eletromagnético viajando.
Motores lineares são mais comumente motores de indução ou motores de passo. Você pode encontrar um motor linear em um maglev( Transrapid trem), onde o trem "voa" sobre o solo.
Veja também
Interruptor de centrífugas | Comutador (elétrica) | elemento Elétrica | gerador elétrico | Veículo elétrico | Frank J. Sprague | George Westinghouse | Lista de tópicos de eletrônicos | Lista de tecnologias | teorema máximo de energia | Motor | controlador Motor |método de Propulsão | monofásico de energia elétrica | anel deslizante | Tabela viu | Thomas Edison | Timeline do motor e tecnologia de motores | Westminster kits de motor
Um livro de auto-aprendizagem que abrange brevemente motores elétricos, transformadores, controladores de velocidade, códigos de fiação e aterramento, transistores , arte digital, etc., é:
Shanefield DJ, Electrónica Industrial para engenheiros, químicos e técnicos, William Andrew Publishing, Norwich, NY, 2001.
Embora este livro é extraordinariamente fácil de ler e entender (ver comentários de clientes em sites de livrarias), ele só vai até um nível elementar sobre cada assunto, e não é um livro de referência adequado para tecnólogos que já trabalham em qualquer um desses campos
- Helicóptero
Um helicóptero é um avião que está levantado e propelido por um ou mais grandes horizontais rotores (hélices). Os helicópteros são classificados como aeronaves de asa rotativa para distingui-los dos aviões de asa fixa convencional. A palavra...
- Motor De Combustão Interna
Motor Um motor é algo que produza algum efeito a partir de uma dada entrada. A origem de engenharia foi o funcionamento de motores. Há uma sobreposição em Inglês entre dois significados da palavra "engenheiro": "aqueles que operam motores" e "aqueles...
- Termóstato
Um termostato é um dispositivo para a manutenção da temperatura de um sistema dentro de uma gama de controlo , quer direta ou indiretamente, o fluxo de calor de energia para dentro ou para fora do sistema. Mecânico Bi-metálicos Em um vapor ou a...
- Foguete - Como Funciona O Foguete
O termo foguete aplica-se a um motor que impulsiona um veículo expelindo gases de combustão por queimadores situados em sua parte traseira. Difere de um motor a jato por transportar seu próprio oxidante, o que lhe permite operar na ausência de um...
- Máquina A Vapor - Invenções
Um motor de vapor é um motor de calor que faz uso da energia térmica que existe em vapor , convertendo-a em trabalho mecânico .Os motores a vapor foram usados ??em bombas , locomotiva trens e navios a vapor , e foram essenciais para a Revolução...